Sparse high-degree polynomials for wide-angle lenses | |
|
Emanuel Schrade,
Johannes Hanika
|
|
motivation
fisheye lenses


panoramic cameras

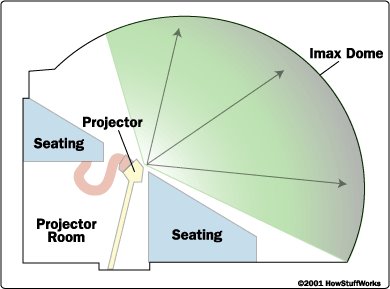
rendering for the imax dome
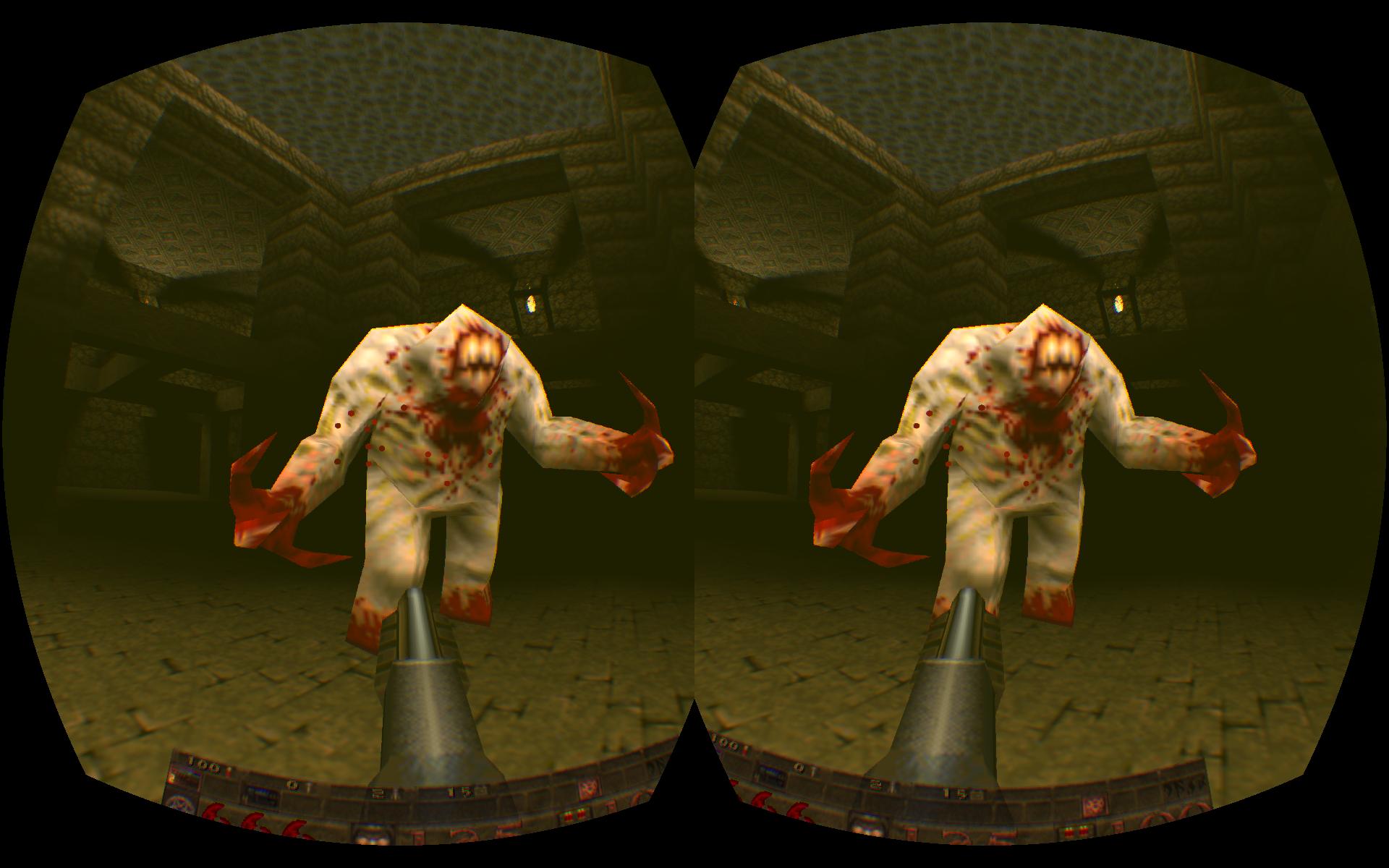
rendering for virtual reality
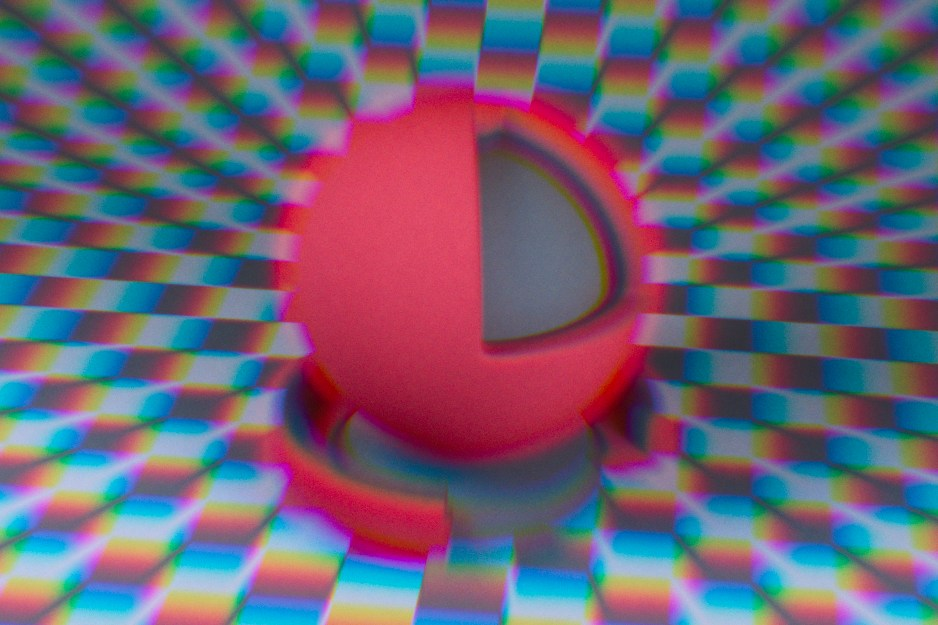
photorealistic rendering
- flat and boring bokeh

photorealistic rendering
- interesting bokeh, distortion, and vignetting to match plate

state of the art
approximate lens systems with simple polynomial
- collapse complicated ray tracing
- simple function evaluations $\mathbf{A} = P_a(\mathbf{S})$ and $\mathbf{O} = P_o(\mathbf{S})$
$\mathbf{S}$
$\mathbf{A}$
$\mathbf{O}$
$P_a(\mathbf{S}): (x_s, y_s, dx_s, dy_s, \lambda) \mapsto (x_a,y_a,dx_a,dy_a,\tau_a)$
$P_o(\mathbf{S}): (x_s, y_s, dx_s, dy_s, \lambda) \mapsto (x_o,y_o,dx_o,dy_o,\tau_o)$
optics use polynomials to ray trace
- approximate ray tracing using polynomials for lens designers [ZHB10]
- and analyse error in that domain directly

all based on Taylor expansion
- scary formulas for analytic differentiation required!
-
not precise in outer rims [HD14]
- use Taylor configuration, optimise coefficients
fisheye lenses
- precision in periphery is important!
-
current lens connections (for light tracing)
- sample outer pupil uniformly
- have terrible performance


technical contributions
-
parametrise the light fields for fisheyes
- no plane/plane 180-degree limit
-
parametrise the light fields for fisheyes
- no plane/plane 180-degree limit
-
sparse fitting of high-degree polynomials
- use orthogonal matching pursuit (OMP)
- enables trade-off between approximation error and evaluation speed
-
parametrise the light fields for fisheyes
- no plane/plane 180-degree limit
-
sparse fitting of high-degree polynomials
- use orthogonal matching pursuit (OMP)
- enables trade-off between approximation error and evaluation speed
-
aperture sampling for light tracing
- enable the use in bidirectional path tracing etc.
-
parametrise the light fields for fisheyes
- no plane/plane 180-degree limit
-
sparse fitting of high-degree polynomials
- use orthogonal matching pursuit (OMP)
- enables trade-off between approximation error and evaluation speed
-
aperture sampling for light tracing
- enable the use in bidirectional path tracing etc.
- fast GPU preview rendering implementation
parametrisation suitable for fisheye lenses
- plane/plane on sensor
- plane/plane on aperture
- hemi-sphere/hemi-sphere on outer pupil




hemi-sphere/hemi-sphere on outer pupil
$x, y$
$dx, dy$
optical axis
- need to specify tangent frame for $dx, dy$
- avoid the singularity in interesting regions on the outer pupil
finding a polynomial
- polynomial consists of these terms: $$c \cdot \underbrace{x_s^{d_{0}} y_s^{d_{1}} dx_s^{d_{2}} dy_s^{d_{3}} \lambda_s^{d_{4}}}_{=:T_t} \text{ with degree } \sum_{i=0}^4 d_{i} \le d$$
-
find most closely matching polynomial for given set of ray traced reference samples
-
linear problem, Galerkin projection of function $\mathbf{O} = P_o(\mathbf{S})$ to
$$\mathbf{O} \approx \hat\Phi \cdot \mathbf{c}$$ with
$$\hat\Phi = \left(\begin{array}{ccccc} T_1 & T_2 & \cdots & T_{N-1} & T_N \\ T_1 & T_2 & \cdots & T_{N-1} & T_N \\ \cdots\\ T_1 & T_2 & \cdots & T_{N-1} & T_N \\ \end{array}\right)$$
- each row in $\hat\Phi$ corresponds to one input sample ($10\times N$ ray traced references)
- $N$ depends on the max degree $d$ as $N(d) = \binom{n+d}{d} = 4368$ (for 5 variables and degree $d=11$)
-
linear problem, Galerkin projection of function $\mathbf{O} = P_o(\mathbf{S})$ to
- standard procedure (linear least squares), but the matrix is too large for our taste!
finding a sparse polynomial
- use orthogonal matching pursuit [TG07]
- iteratively select most important columns in $\hat\Phi$
- original just looks for largest impact on residual (fast)
- we got better results by re-fitting all coefficents $c$ of all previously selected columns in the inner loop (somewhat slower)
- details see the paper
finding a sparse polynomial
- use orthogonal matching pursuit [TG07]
- iteratively select most important columns in $\hat\Phi$
$$ \hat\Phi\cdot\mathbf{c} = \left(\begin{array}{cccc} T_1 & T_3 & \cdots & T_N \\ T_1 & T_3 & \cdots & T_N \\ \cdots\\ T_1 & T_3 & \cdots & T_N \\ \end{array}\right)\cdot \left(\begin{array}{c} c_1\\ c_3\\ .\\ c_N \end{array}\right)\approx\mathbf{O} $$
- we use up to 40 coefficients per equation (out of 4368 for degree 11)
- works transparently for aspheric and anamorphic lens elements
- in particular no analytic Taylor expansion required!
- we also fit Fresnel transmittance $\tau$ to support coatings
aperture sampling via 2-step Newton iteration
- initial guess: straight on optical axis
- aperture error $\Rightarrow$ update sensor direction
- error in outgoing direction $\Rightarrow$ update sensor position
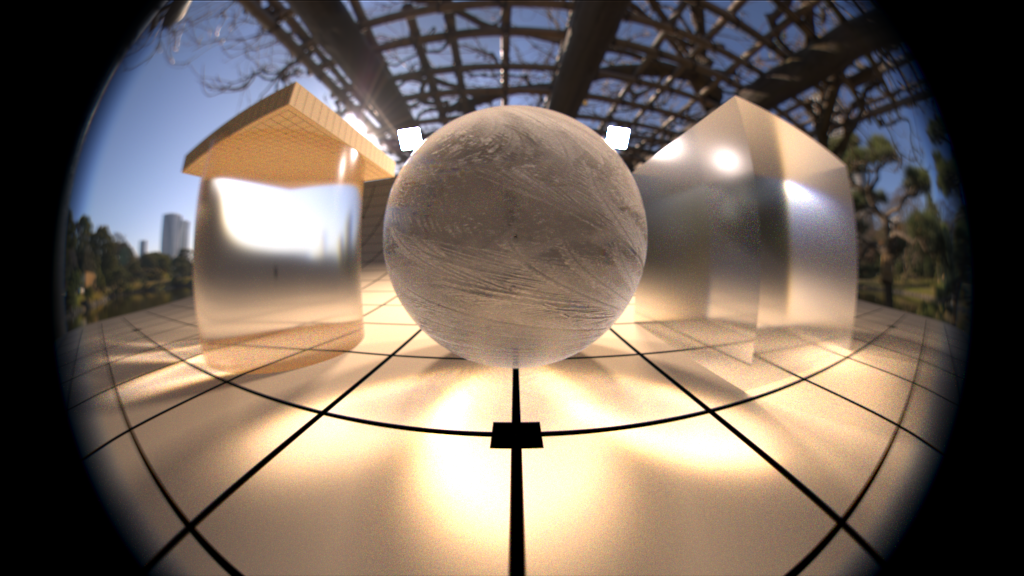
results: aperture sampling for light tracing (512spp)
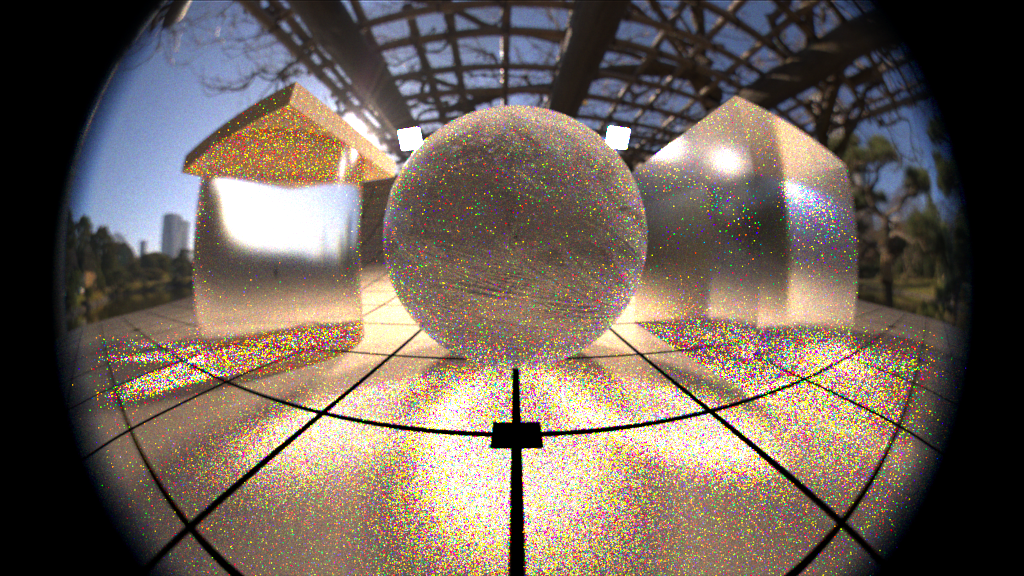
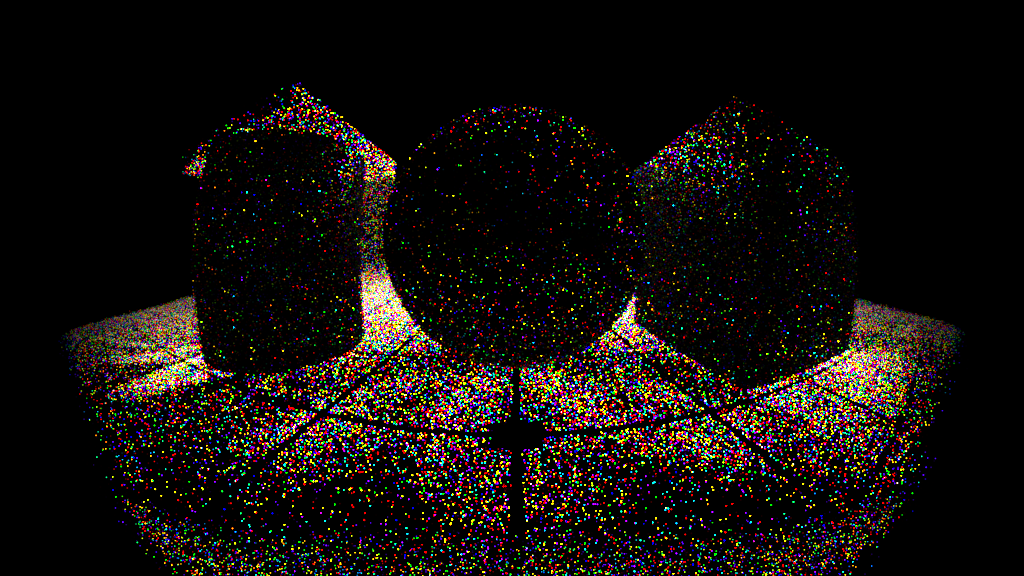
reference
next event estimation
light tracing (ours)
outer pupil sampling
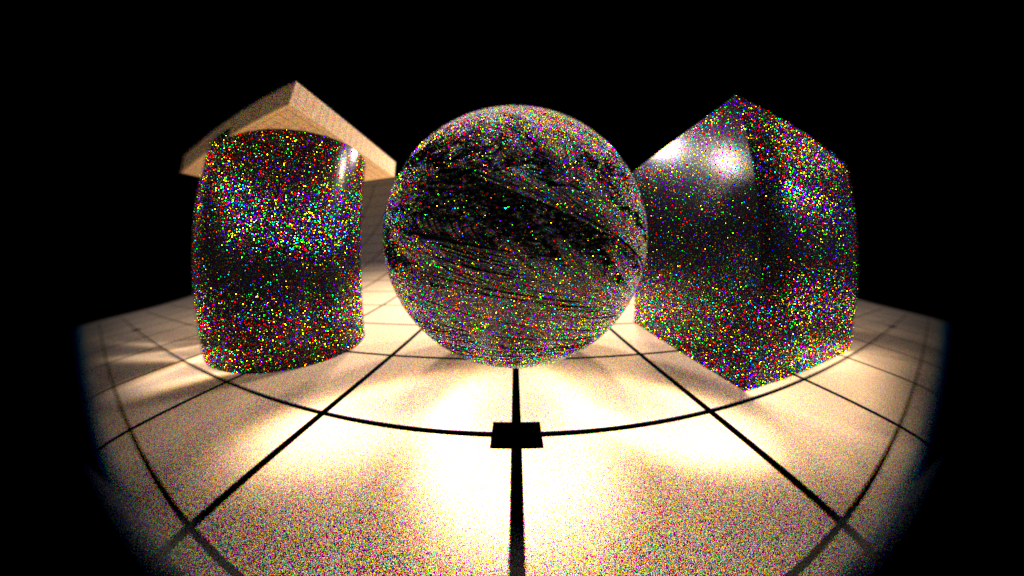
results: aperture sampling for light tracing (closeup)
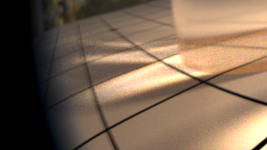
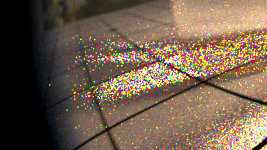
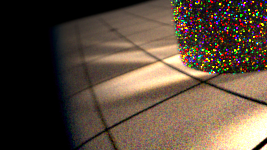
reference
next event estimation
light tracing (ours)
outer pupil sampling
thank you for listening!
source code at https://jo.dreggn.org/home/2016_optics.tar.bz2